Introductio
Sector fabricationis autocineticae magis magisque in robotis industrialibus nititur ad praecisionem, efficientiam, et constantiam in productione assequendam. Inter applicationes gravissimas est soldadura partium autocineticarum, praesertim.axes(etiam notus utaxes vehiculorumvelaxes curruum), quae ad stabilitatem vehiculi, transmissionem potentiae, et portationem oneris necessaria sunt. Hic articulus explorat quomodo progressaSystemata soldandi roboticaproductionem axium aliarumque partium autocineticarum revolutionant, dum praecipuas voces clavis in utroque illustrantpartes autocineticaeetrobotica soldandi.

Sectio I: Elementa Autocinetica Clavia in Focus
Fabricatio autocinetica intricatas compositiones requirit, cum hae partes ad functionem vehiculi necessariae sint. Hic sunt...Quinque verba clavis praecipua partium autocineticarumad hanc disputationem pertinentes:
- Axis (Axis Vehiculi/Axis Autocineti)
Axes centrales sunt transmissioni vehiculi, rotas connectentes et pondus vehiculi sustinentes. Subligatio accurata integritatem structurae et firmitatem praestat. - Systema Suspensionis
Partes sicut brachia gubernatoria et fulcra robustam soldaduram requirunt ut vim viariam sustineant. - Partes Transmissionis
Partes sicut involucra differentialium et fulcra transmissionis suturis magnae firmitatis pendent. - Chassis Frames
Spina vehiculi, structurae chassis, qualitatem suturae constantem propter salutem requirunt. - Systema Exhaustorium
Suturae complexae in tubulis et canalibus calori et corrosioni resistere debent.
Ex his,soldadura axiumeminet propter complexitatem technicam et impulsum in efficaciam vehiculi.

Sectio II: Automata Soldandi Industrialia: Technologia et Facultates
ModernusSystemata soldandi roboticatechnologias provectas integrare ut normas autocineticas impleat. Infra suntQuinque verba clavis praecipua robotorum soldadurae:
- Soldatura Automata
Automatio repetibilitatem praestat et errorem humanum in productione magnae voluminis minuit. - Soldatura Arcus (MIG/TIG)
Ad axium fabricationem praefertur propter profundam penetrationem et validam formationem iuncturarum. - Soldatura Laseriana
Ad opera altae praecisionis adhibitus, ut ad tenues axes cum minima distortione conglutinandos. - Soldatura Punctorum
Idoneum ad iungendas laminas metallicas imbricatas in partibus suspensionis vel chassis. - Automata Collaborativa (Cobots)
Flexibilitatem in ambitus mixtae productionis auge, una cum technicis laborans.
Hae technologiae fabricatoribus permittunt ut consequantursoldadura sine vitiisin partibus criticis sicut axibus.
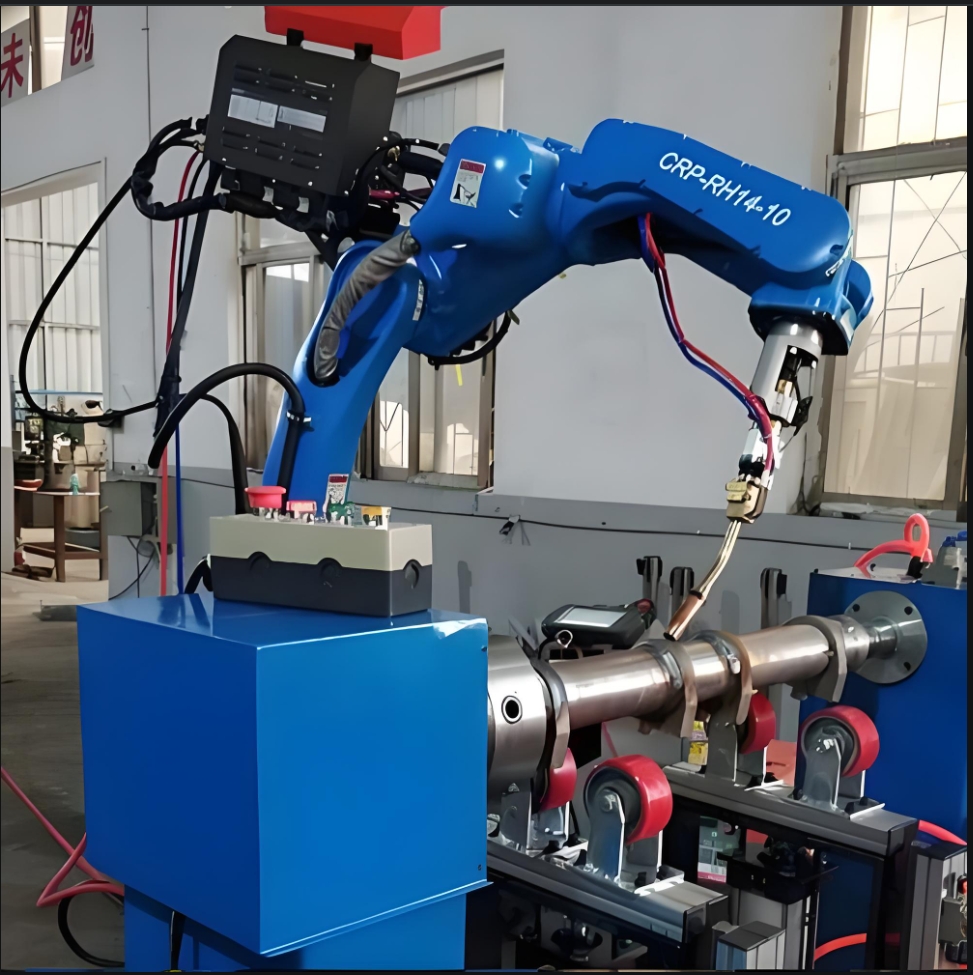
Sectio III: Axes Soldandi cum Robotis Industrialibus: Processus et Beneficia
Gradus 1: Designatio et Programmatio
Soldatura axium incipit cum simulationibus CAD/CAM ad vias soldaturae optimizandas. Automata programmantur ad motus multiaxiales, aditum ad geometrias complexas praebentes.
Gradus II: Praeparatio Materiae
Axes plerumque ex chalybe altae firmitatis vel mixturis aluminii fiunt. Systema robotica superficies praepurgant et partes prehendunt ut errores alignmentorum quam minime oriantur.
Gradus III: Executio Soldaturae
- Soldatura ArcusAd crassa axium involucra adhibitus, suturas profundas et uniformes efficiendo.
- Soldatura LaserianaAd iuncturas praecisionis in designis axium levium adhibitum.
- Sensoria Sequendi SuturasIncongruentias materiales in tempore reali compensa.
Commoda Soldaturae Axium Roboticae:
- Robur AuctumSuturae constantes puncta infirma minuunt.
- Tempora Cyclorum CelerioraAutomata perpetuo operantur, productionem augentes.
- Sumptus ConservatiRationes vastorum inferioris et sumptus laboris imminuti.
- SalusScintillas et fumos operariis eliminat.
Sectio IV: Inclinationes Industriae Soldaturam Roboticam Formantes
- Qualitatis Moderatio ab Intelligentia Artificiali Potens
Algorithmi discendi automatici integritatem suturae examinant, vitia in tempore reali notantes. - Postulata Levioris Allevationis
Automata se aptant ad materias provectas, sicut composita aluminium et carbonium, pro axibus vehiculorum electricorum (EV) conglutinandas. - Integratio rerum interretialium (IoT)
Automata ingeniosa notitias de perfunctione ad systemata centralia ad sustentationem praedictivam transmittunt. - Sustentabilitas
Processus soldadurae efficaces in energia vestigia carbonis minuunt.
Hae inclinationes positionemSystemata soldandi roboticatamquam indispensabilis in hodiernis fabricis autocineticis.
Sectio V: Provocationes et Solutiones
Dum soldadura robotica ingentia commoda offert, difficultates manent:
- Magnum Investimentum InitialeMitigatum per reditum investitionis diuturnum ex aucta productivitate.
- Programmatio ComplexaSimplificatum per interfacies faciles utendo et instrumenta simulationis offline.
- Variabilitas MaterialisSensoriis adaptivis et accommodationibus ab intellegentia artificiali impulsis tractatum.
Ad axium soldaduram, societatem cum peritis ineundofabricatores robotarum industrialiumsolutiones ad singulorum necessitates aptatas praestat.
Conclusio
Soldatura partium autocineticarum, ut axium, vim transformatricem exemplificat.automata industrialiaUtendosoldadura automatica,soldadura arcuata, etsoldadura lasericatechnologiarum, fabri praecisionem et efficaciam incomparabilem consequuntur. Dum industria autocinetica evolvitur — praesertim cum ortu vehiculorum electricorum —Systemata soldandi roboticaCentralis manebit ad producendas partes durabiles et summae efficaciae. Negotiis quae lineas productionis suas modernizare volunt, in roboticas soldadurae provectas investire non solum optio sed necessitas est.
Verba ClavisAxis, Axis Vehiculi, Systema Suspensionis, Partes Transmissionis, Chassis Panels; Soldatura Automata, Systema Soldaturae Roboticae, Soldatura Arcus, Soldatura Laser, Soldatura Punctata.
Tempus publicationis: II Aprilis MMXXXV



