Fabricatio industrialis nexus magni momenti est ad progressionem oeconomicam et socialem promovendam. Hodie, investigatio de apparatu automatico ad soldandum profundior fit et concreta fit, quod late adhibetur in productione variorum generum structurarum ad soldandum.
In processu soldadurae automaticae, intelligens et digitalis rationabilis moderatio erroris hiatus inter partes soldadurae quodammodo adhibetur, hac de causa etiam differentia positionis materiae, deviatio iuncturae materiae, et aliae res considerandae sunt. Ergo, technologia suturae soldadurae laseris investigandae magnum momentum in processu soldadurae agit.
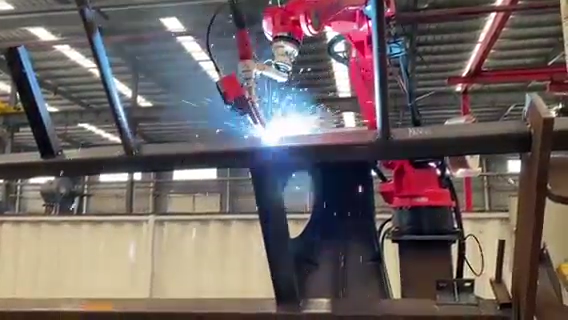
Soldatura basis currus cisternae cementi; orbita terrestris septem axium; rotatio octo axium cum soldadura laserica.
-Situs materiae laborandae magnopere variat
Deviatio ad nexum materiae exsistit
-Magna accuratio soldadurae requiritur
-Ambientia mala ad soldaduram faciendam et fumus
Hoc in casu, robotus intelligens Yooheart HY1006A-145 ad soldaduram cum systemate laserico suturarum soldadurae indagationis adhibetur, quod magnam flexibilitatem, stabilitatem et firmitatem habet.
Ante singulas soldaduras, apparatus primum coordinatas suturae soldadurae per locationem suturae soldadurae perlustrat et registrat, deinde per algorithmum internum aberrationem coordinatarum computat et parametros coordinatarum referentialis in tempus actuale inserit ut deviationem actualem tempore corrigat, ita ut obsignatio et integritas producti post soldaduram confirmetur.
Methodus "intersectionis quattuor punctorum"
Ut omnibus notum est, duo puncta lineam rectam determinant, sed congregatio materiae operandae angulum formabit, algorithmus conventionalis positionem eius determinare non potest, hoc requirit ut methodus "intersectionis" ad horam quartam adhibeatur, duae lineae intersecantes punctum intersectionis producunt. Algorithmus specialis per determinationem coordinatarum quattuor punctorum notarum positionem coordinatae puncti intersectionis calculat, ut propositum soldadurae assequatur.

Systema suturarum laseris indagationis
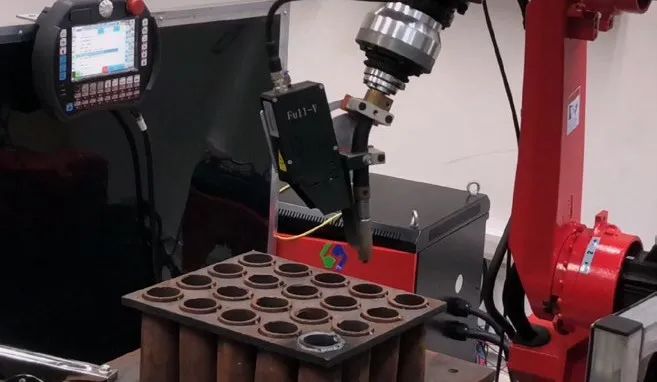
Systema vestigationis suturarum soldadurae lasericae praecipue constat ex sensoribus lasericis et terminalibus monitoriis. Sensor lasericus ad acquisitionem activam et tractationem in tempore reali informationis suturarum soldadurae adhibetur, et communicationem in tempore reali cum robotis industrialibus conservat. Terminal monitorius sensoria monitorat et configurat. Systema etiam functiones habet locandi, vestigandi et perscrutandi ante soldaduram ut necessitatibus soldadurae intelligentis satisfaciat.
Principium operandi: Scrutatio suturarum, aptatio imaginis nubis punctorum, algorithmus accurate puncta propria identificat, et data in tempore reali ex eventibus calculationis ad robotum missa, in instructiones moderandi, operationem roboti modificat vel dirigit.
Solutio laminae corrugatae

Solutio automatica ad obturandum foramen rotundum

Solutio suturae circularis

Solutiones laminarum tubularium
Yunhua Intelligent celerem usum, tutas efficacesque automationis solutiones, necnon systemata in tempore reali praebere potest. Systema vestigationis suturae soldadurae visionis lasericae permittit roboti soldadurae locationem et vestigationem suturae soldadurae in tempore reali perficere, et cursum soldadurae corrigere secundum discessum suturae soldadurae in processu soldadurae, ut veram soldaduram intelligentem efficiat.
Tempus publicationis: IX Aprilis MMXXII



