Effectus ferrariae roboticae multis modis afficitur. Multi clientes, antequam periti in usu robotarum ferrariarum sint, quibusdam difficultatibus plus minusve occurrent. Haec problemata, ut ita dicam, ex operatione impropria vel configuratione robotarum impropria oriuntur, et per aptationes congruentes solvi possunt. Deinde, editor te ad recensendum nonnulla problemata, quae saepe in usu robotarum ferrariarum Yunhua et solutionum conexarum oriuntur, ducet.
1. Arcus incipiens infelix durante soldadura
1. Arcus nondum coepit.
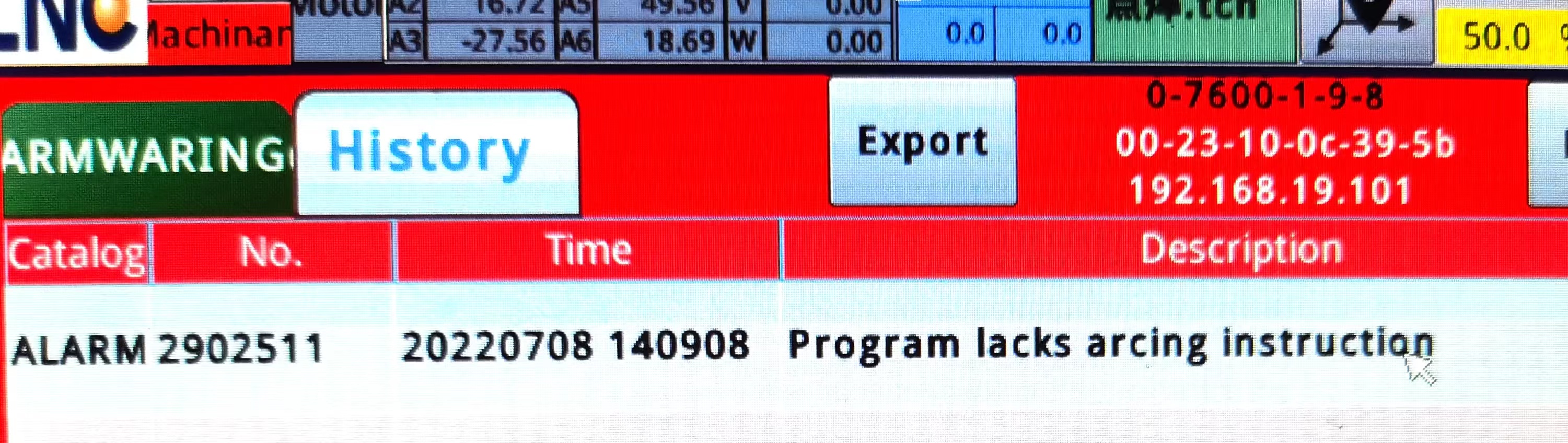
Ratio: Nullum mandatum arcus incipiendi correspondens est antequam mandatum arcus finiendi in programmate edito exsequaris.
Modus processus: Inspice utrum unum mandatum finis arcus amplius an unum mandatum initii arcus minus addere debeas.
2. Arcus incipere non potuit, detectio signi erronea est.
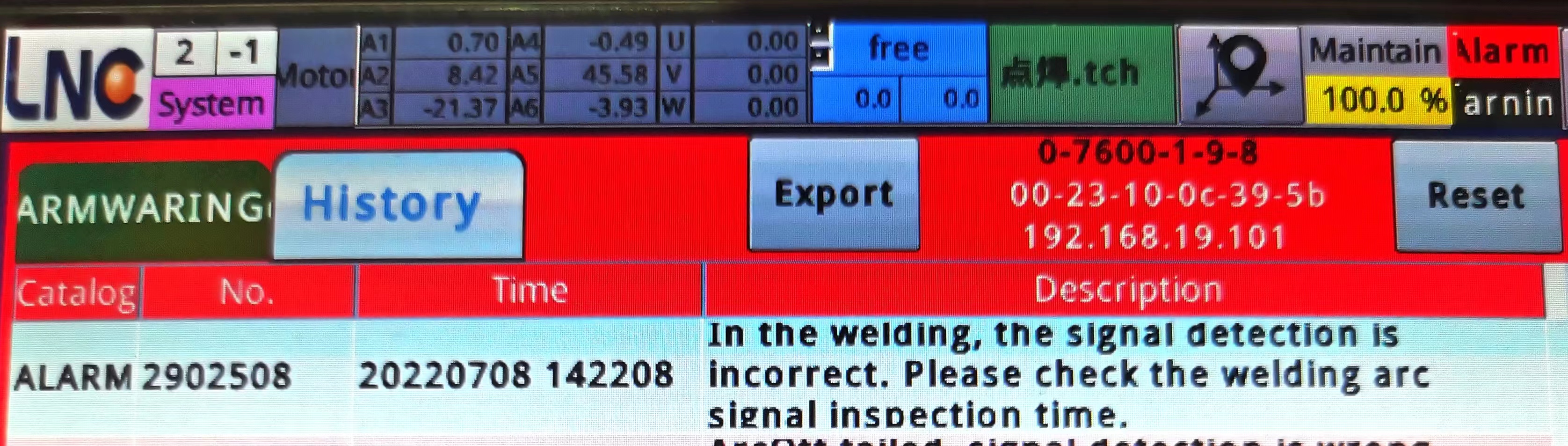
Aditus:
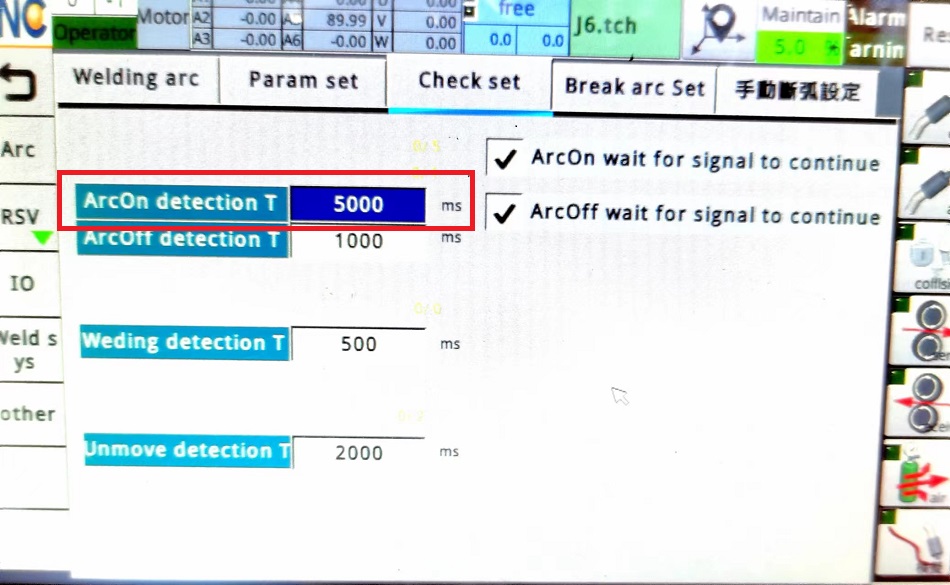
1) Tempus interruptionis soldandi in pagina parametrorum inspice. Generaliter, tempus ad 5000ms constituere convenit.
2) Inspice num signum machinae ad soldandum feliciter ad systema transmittitur.
3) Inspice num materia laboranda fundata sit.
3. Filum Arcus Frictum
causa:
1) Discrepantia currentis et tensionis
Modus processus: Necesse est nobis aptam vim electricam et tensionem secundum crassitudinem actualem materiae et machinae ad soldandum constituere.
2) Longitudo fili ad sudandas nimis longa est.
Modus curationis: Generaliter, longitudo fili soldadurae est decies ad quindecies diametrum fili soldadurae, et longitudo idonea fili soldadurae secundum diametrum fili soldadurae eligitur.

Nimis parva vis electrica ad suturas inaequales ducit

Currentis et tensio normalis, sutura pulchra et firma

Extremum faces soldandi filum globulum involvet

Filum extremitatis faces soldandi in bona condicione est post soldandi normalem.
4. Phaenomenon extinctionis automaticae arcus post arcuationem fit.
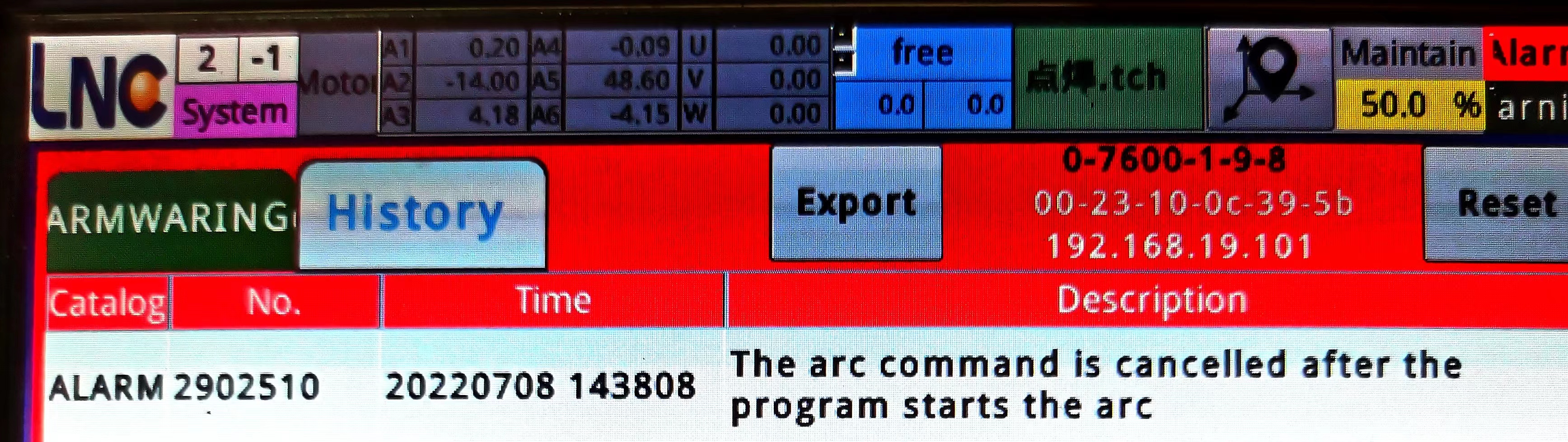
Solutio: Inspice num problema sit cum parametro "tempus non movens" constituto, et num taeda soldandi mota sit.
2. Arcus interruptus fit dum ferruminatur
causa:
1. Si filum soldadurae opus non tangit, signum arcus interrupti excitabitur.
Modus curationis: Locum fili ferrantis et materiae laboris iterum compone, ut filum ferrantis materiam laboris plene tangat dum ferrum incipiunt. (Sed non nimis prope materiam laboris esse debet, ne per materiam ferrum ferre possit.)
2. Via soldadurae iniusta efficit ut caput sclopeti sponte attollatur propter collisionem.
Solutio: viam soldadurae restituere
3. Fila positiva et negativa machinae ad soldandum male inter se attingunt.
Modus curationis: Statum filorum positivorum et negativorum inspice.
3. Causae defectus finis arcus post soldaduram
1. Arcus defectus, error detectionis signalis
Causa: Machina soldadurae signum a roboto non accepit, quod effecit ne robot arcum clauderet.
Aditus:
(1) Inspice utrum parametri constituendi sint rationabiles.
(2) Signum IO inspice, et utrum signum puncti terminalis I abnormale sit. Si signum puncti I ON pergit ostendere.
(3) Inspice num breve circuitum in linea sit et num filum terrae abnormaliter coniunctum sit.
2. Nullum mandatum arcus sistendi post ictum arcus ponitur.

Ratio: Cum hoc signum in manubrio docendo apparet, vide num mandatum finis arcus addere oblitus sis.
Modus processus: mandatum finis arcus post mandatum initii arcus in programmate adde.
Haec quaestio imprimis problemata roboti ferranti Yunhua quae arcus incipiunt, interrupunt, et finem arcus in processu ferranti tractat. Si usores tales difficultates in usu experiuntur, ad solutiones consulere possunt. Si solvi non possunt, auxilium a technicis Yunhua tempore pete.
Si plura problemata communia et solutiones Yunhua Robot scire vis, rationem officialem Yunhua Robot attende.
Automatum ferrariam Yunhua est automatum qui ferrarias multifunctionales, ut ferrarias gasis protectas, ferrarias arcu argonico, sectionem plasmatis, et ferrarias laseris, integras, habet. Magnam flexibilitatem, validum accommodationem, efficientem ferrariam, et stabilem qualitatem ferrariam, et late in variis campis adhiberi potest, ut in fabricatione machinarum, fabricatione autocinetorum, electronicis accuratis, carbonariis aliisque campis.
Tempus publicationis: XV Iulii, MMXXII



