
Automatum Quattuor Axium Impressionis pro Machina Preli



Introductio Producti
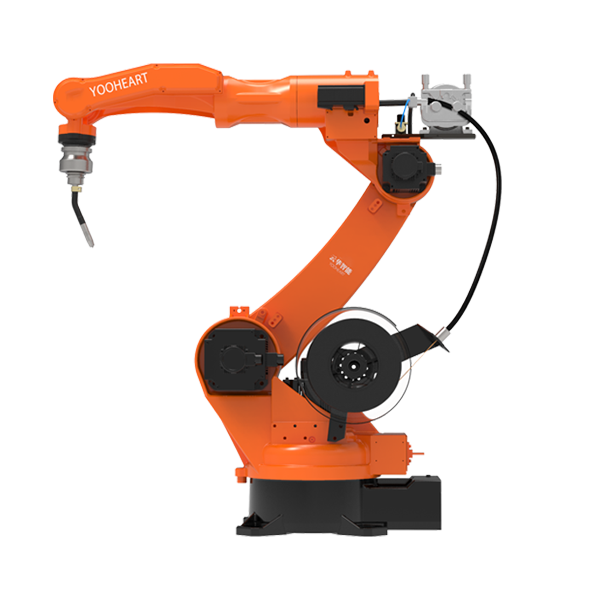
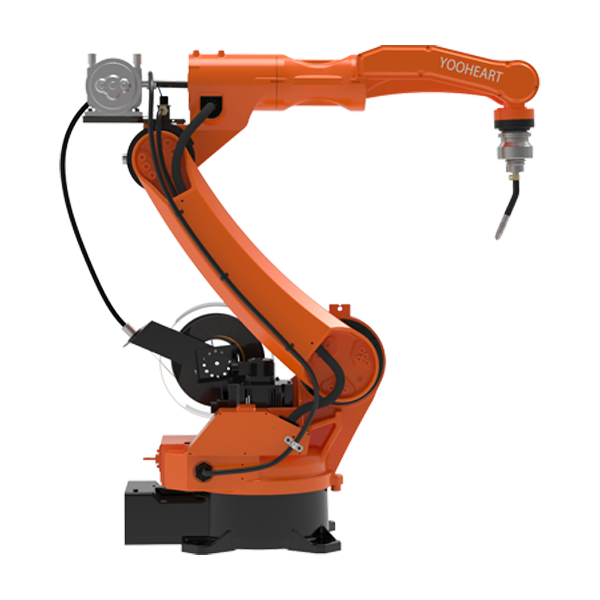
Ob actualem postulationem industriae impressionis ad meliorem statum et transformationem, robotus quadriaxialis ad impressionem tractandam, magna flexibilitate et simplici moderatione praeditus, designatus et elaboratus est.
Automata quattuor axium perforationis designum quattuor axium, formam compactam, magnitudinem parvam, pondus leve adhibet, late in soldadura arcus argonii, paletizatione, tractatione, impressione et aliis campis adhibetur, manipulationem stabilem et soldaduram accuratam perficere potest. Manipulator quattuor axium perforationis operationem impressionis flexibiliter in spatio parvo perficere potest, et simplex ac commoda est ad instituendum et corrigendum.
Partes Centrales
Omnes partes Sinenses altae qualitatis
Motor Servo
Servomotoris nomen Ruking est, nomen Sinense quod celeritatis reactionis, magnae proportionis momenti ad inertiam momenti initialis, et cetera praebet. Durissimas condiciones operationis, quae accelerationes et retardationes crebras et antrorsum et retrorsum efficiunt, tolerare potest, et onus multiplicem brevi tempore tolerare.
Systema Moderationis LNC
Automatum Yooheart programmationem docendi adhibet. Simplex, commodus, et flexibilis in operatione est. Automatum Yooheart etiam programmationem remotam sustinet, quae in variis programmatibus complexis adhiberi potest.
CORPUS ROBOTIS
Corpus processum fusionis sub pressione adhibet, cavitate formae utens ad pressionem magnam ad formationem metalli liquefacti applicandam, corpore densitatis altae, rigiditatis magnae formante, suo pondere leviore.
Detalia Ostende
Alta Praecisio
Celeris responsio actionis
Et gradus praevalet
in patria
Simplex structura
Facile conservatur
Magis sumptuum efficax
Celeritas alta et stabilitas
Semita accurata
Perfectae solutiones imprimendi
Parametrus Robotis
| Proiectum | Specificatio | Proiectum | Specificatio | Axis | Ambitus motus | Celeritas maxima | Diametro Cava |
| Axis | 4 | Temperatura | 0℃-45℃ | J1 | ±170º | 190º/s | —— |
| Capacitas | 3.7KVA | Humiditas | 20-80% RH (sine humiditate) | J2 | +10°~+125° | 120º/secunda | —— |
| Pondus | CLXX chiliogrammata | Vibratio | Sub 4.9M/S² | J3 | +10°~-95° | 120º/secunda | —— |
| Maxima sarcina | Decem chiliogrammata | Alii | Nullae gases et liquores inflammabiles et corrosivi, procul a fontibus strepitus electrici arceantur. | J4 | ±360º | 200º/s | —— |
| Maximus spatium laboris | 140cm | Repetibilitas | ±0.08mm | Gradus IP | IP65 | Installatio | Solum |
Applicatio Robotica
Onus et exoneratio producti extrusi calidi
Hoc proiectum praecipue ad formationem cupri impressoris pertinet. Processus perforationis rubrae est processus extrusionis calidus. Per perforationem rubram, materia metallica ad certam temperaturam calefacta et in formam praecalefactam immittitur. Post motum reciprocum semel factum machinae pressoriae, materia metallica plastica deformatur ut magnitudo, forma et bonae proprietates mechanicae partium impressoriarum necessariae obtineantur. Cliens robotem tractationis quadriaxialem Yooheart adhibit ad materiam metallicam perforationis rubrae onerandam et exonerandam.
Conspectus Solutionis Integrationis
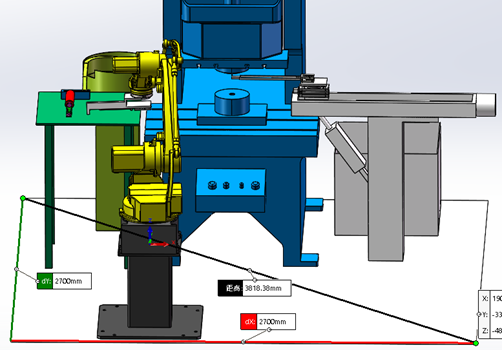
Proiectum constat ex prelo perforatorio, roboto Yunhua quadriaxiali decem chiliogrammatum, instrumentis secundariis positionis, instrumento obturationis cylindri composito, et cetera. Data nota, ut tempus translatum, onus aestimatum, et condicio laboris, omnia intra ambitum parametrorum aestimatorum HY1010B-140 sunt.


Conspectus Processus Productionis
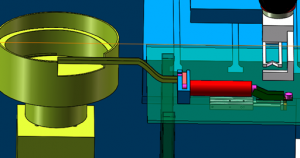
Alimentatio manualis pro machina elevatoria ▶ alimentatio laminae vibrantis ▶ Positio instrumenti alimentationis ante calefactionem ▶ calefactio tubi currentis turbulenti ▶ positio instrumenti positionis secundarii ▶ compressio robotica ▶ pressio preli perforatricis ▶ exoneratio instrumenti alimentationis cylindri
Summarium actionis instrumenti pascendi et collocandi
Laminam vibrantem manu introduce ▶ Lamina vibrans est materiae copia pro tubo calefactionis currentis turbulentis ▶ Instrumentum secundarium positionis est positio fibulae roboticae
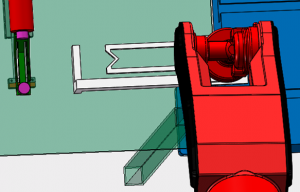
Conspectus actionis instrumenti premendi
Automatum materiam cupream positam ▶ ad perforationem formandam prehendet.
Servitium Post-Venditionis
Perfectam post-officiam habemus ut te adiuvemus operationem discere etiam si numquam robotis industrialibus usus es et problemata solvere tempore usus tui.
Primum, manuales pertinentes praebebimus ut quasdam informationes de robotis intellegas.
Deinde, seriem pellicularum didacticarum praebebimus. Has pelliculas gradatim sequi potes, a connexionibus et programmatione simplici ad programmata complexa perficienda. Haec est via efficacissima ad te sub condicionibus COVID adiuvandum.
Denique, sed non minime, officium interretiale cum plus quam viginti technicis praebebimus. Si quas quaestiones habes, nobiscum quovis tempore contactum facere potes et te celeriter adiuvabimus.


Petitio rogationis
Q. Estne hoc tutum operariis?
A. Certe, unum ex commodis roboti ad machinas tollendas et collocandas est operarii ab iniuriis protegere. Unus operarius quinque vel sex unitates machinarum CNC tractare potest.
Q. Quale productum robot onerandi et exonerandi uti potest?
A. Quaeque machina robotica oneratrix instrumentis in extremo brachii aptis instructa esse potest, quae cum machina tua et producto congruunt. Summa accuratione praeditae sunt et etiam dexteritatem habent ad partem cum cura tractandam.
Q. Unum tantum extremum instrumentorum brachii ad onerandum et exonerandum robotem adhiberi potest?
A. Bracchium roboticum industriale programma et prehensoriam modificare potest, mutationes celeres in horreo intelligente, celeritate deprehensionis, eliminatione necessitatis operariorum et temporis institutionis, celeriter in productionem induci potest.
Q. Estne ullum aliud commodum robotum onerandi et exonerandi?
A. Qualitatem partis fabricandae emendare. Aspectus: lineae productionis automatae roboticae, ab alimentatione, prehensione, sectione omnino a robotis, ad nexus intermedios reducendos, qualitas partis magnopere augetur, praesertim superficies pulchrior.
Q. Potesne solutiones plenas ad onerandum et exonerandum robotum praebere?
A. Certe, id una cum venditore nostro facere possumus.
Categoriae productorum
-

YH1006A-175: Automatum Soldandi Sex Axium ad Altam Praecisionem...
-
Robotus sex axium ad soldaduram Mig destinatus ad repositorium
-

Statio Operaria Soldaturae Arcus Roboticae Septem Axium
-

Palletizator Roboticus 6 Gradus Libertatis 165kg Onus Utile
-
Automatum soldandi TIG cum alimentatore filorum
-

Automata ad soldandum arcum partium autocineticarum



